
揭秘 Apollo 高精度地图的诞生之路
高精度地图能在许多方面为无人驾驶车提供帮助:高精度地图通常会记录交通信号灯的精确位置和高度,从而大大降低了感知难度。

高精度地图不仅可以减少计算需求,还可以通过提供有关驾驶环境的详细信息来确保无人驾驶车辆的安全。
保持这些地图的更新是一项重大任务,调查车队需要不断地对高精度地图进行验证和更新。此外,这些地图精度可以达到几厘米,这是水准最高的制图精度。
在中国,Apollo高精度地图拥有丰富的数据,已覆盖中国的高速和城市快速路。预计到2020年,Apollo将涵盖中国的所有国道以及许多其他高等级公路的地图数据。
高精度地图有很多格式,不同格式的采用可能导致系统不兼容。为了方便数据共享,Apollo高精度地图采用了行业制图标准:OpenDRIVE格式。
OpenDRIVE就像API一样,每个人都能轻松读取相同的地图数据,Apollo也对OpenDRIVE做出了改进,进而产生了ApolloOpenDRIVE的标准。
这些改进使该格式更适合无人驾驶车。百度开发了一套完善的地图绘制系统,从而使90%的地图绘制流程实现了自动化。
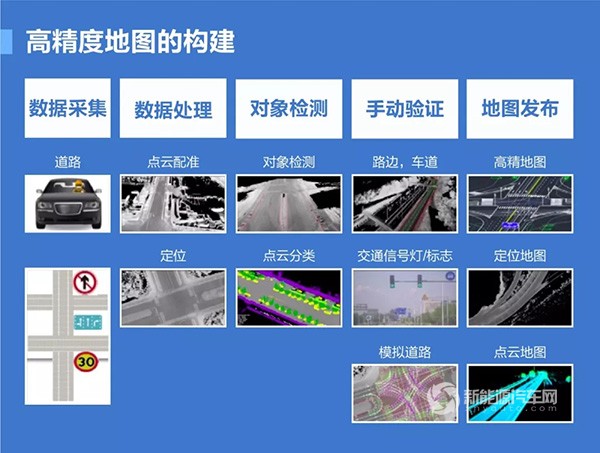
Apollo高精度地图的构建
高精度地图的构建由五个过程组成:数据采集、数据处理、对象检测、手动验证和地图发布。
数据采集
这是一项庞大的密集型任务,近300辆Apollo调查车辆负责收集用于制作地图的源数据,调查车辆不仅有助于地图构建,而且对于地图的维护和更新也非常重要。道路在不断变化,建筑变化也在发生,公共事业工作人员经常对道路进行拆除和重新铺设。然而,无人驾驶车需要其地图始终保持最新状态,大量的调查车辆可确保每次道路发生改变时,地图均会得到快速更新。

调查车辆使用了多种传感器,如GPS、惯性测量单元、激光雷达和摄像机。
Apollo定义了一个硬件框架,将这些传感器集成到单个自主系统中,通过支持多种类的传感器,Apollo可以收集各类数据,将这些数据融合,最终生成高精度地图。

数据处理
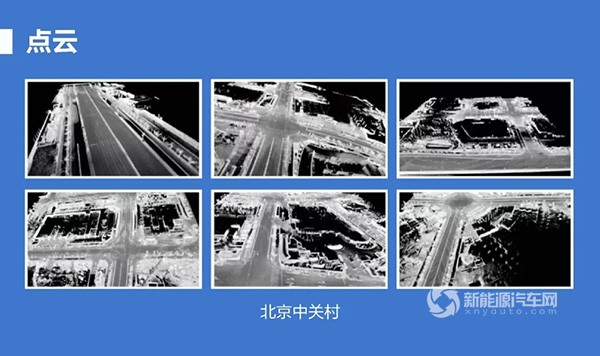
数据处理指的是Apollo如何对收集到的数据进行整理、分类和清洗以获得没有任何语义信息或注释的初始地图模版。例如下面的图像是点云,是由北京中关村手机的数据融合而成的。
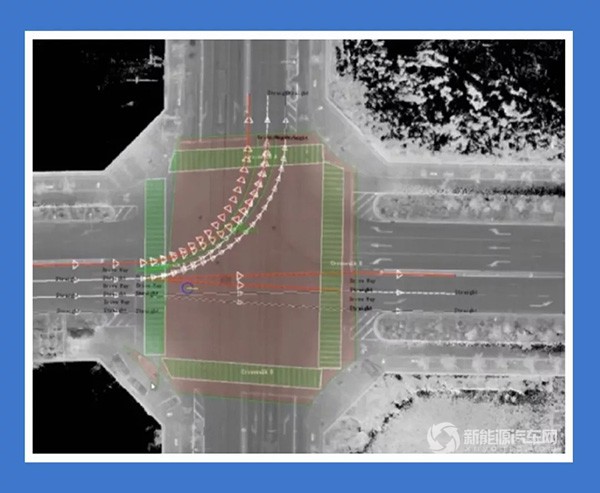
对象检测及手动验证
Apollo团队使用人工智能来检测静态对象,并对其进行分类,其中包括车道线、交通标志甚至是电线杆。
手动验证可确保自动地图的创建过程有序进行并及时发现问题。Apollo软件使手动验证团队能够高效标记和编辑地图。
地图发布
在经过数据采集、数据处理、对象检测和手动验证之后,地图即可发布。
除发布高精度地图外,Apollo还发布了采用自上而下视图的相应定位地图以及三维点云地图。
在构建和更新地图的过程中,Apollo使用了众包。众包意味着Apollo向公众发布其数据采集工具,以便任何人都可以参与制作高精度地图的任务。
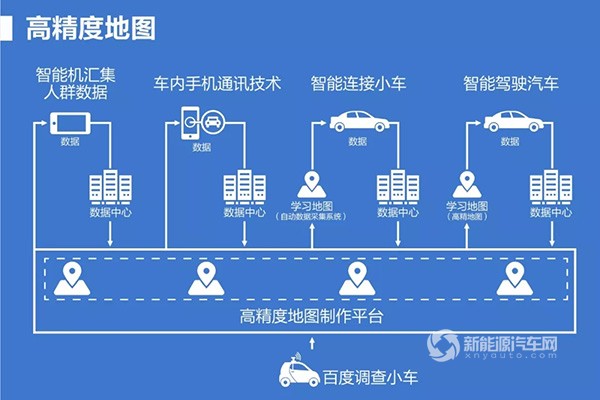
Apollo高精度地图众包可通过智能手机、智能信息娱乐系统甚至是其他无人驾驶车来实现。众包加快了高精度地图制作和维护过程。
优秀的产品源于开放、高效的团队。Apollo团队正在打造的无人驾驶平台,是提供硬件规格、车载软件和云服务的开放软件平台,任何合作伙伴都可以使用此平台开发自己的无人驾驶系统。
百度的宗旨是通过技术让复杂的世界变得更简单,Apollo生态系统是百度最重要的开源贡献之一。目前Apollo团队已经开放了无人驾驶功能,让全世界的工程师都可以在Apollo上打造自己的无人驾驶车。随着参与者的增加,Apollo积累了越来越多的数据可供所有人使用。与封闭的生态系统相比,Apollo的发展速度更快,为参与者带来的收益也更大。
 链接已复制
链接已复制
 点击微信右上角进行分享
点击微信右上角进行分享
 要想评论,请先登录会员!
要想评论,请先登录会员!
 要想点赞,请先登录会员!
要想点赞,请先登录会员!